(Zubair Khawaj, Fahim Khan, Ahmad Sharif, Qaiser habib)
Introduction
Autonomous Vehicles(AV) are the focus of active research these days – many remarkable achievements have been made in the scenario and it can safely be predicted that in the next two decades, completely autonomous routinely driven vehicles will be in contemporary usage. Our project focuses on building a miniature version of the future’s AVs; lack of resources restrains the scope of our project – nevertheless, we will try to develop the intelligence of the vehicle to a near-perfect level.
![]()
Construction
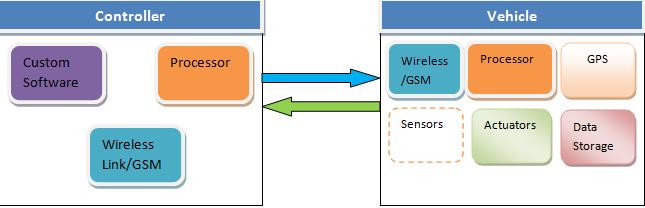
The basic setup of our AV includes a toy car fitted with a GPS receiver, a GSM transceiver and a microcontroller which relays traffic from the central brain computer to the cars actuators the controller is a laptop computer with our custom Google Maps Application which will house highly intelligent algorithms for controlling and maneuvering the car. The intelligence part will rely on Artificial Neural Networks for effective non-linear decision making.
![]()